
After the last ARES SET, Dan W1QK and I were talking about having the ability to have a small portable Winlink station(s) that can be deployed at a shelter or some needed location outside of our EOC. I happened to have a number of small form factor HP computers that mount to the back of LCD displays that we were looking at for the project. However around Christmas time I was flipping through a Harbor Freight ad and saw they had their Apache weatherproof cases on sale that would be perfect for this project. I wanted something smaller and more portable than the PC so I ended up repurposing a Raspberry Pi. I installed and played around with a number of packages such as Paclink, Pat and LinuxRMS. I’ve worked with the AX.25 stack in Linux for many years so it was not hard to get everything up and running.
Then I found Todd Johnson’s RMSPI, which is a prebuilt Raspberry Pi image with PAT and LinuxRMS installed and easy to configure. I backed up my image and installed his and it runs great. Wish I had found that earlier, would have saved 2 days of playing with other software. The only issue I had was that his image only uses the TNC-Pi rather than a standard TNC in KISS mode. I had planned to use a KPC3+ that I had around but it was not working properly. So for testing purposes I used my good old MFJ 1270B that I upgraded with Paccom firmware many years ago. After some working around with the RMSPI image I found that really the only thing that needed to be changed was the baud rate info in the axports config file. I made the changes and got everything running. Rebooted to find it not working again. After some poking around I found that RMSPI creates the axports file each time it starts. Basically the important config items for all the applications resides in a file called rmspi.txt which is on the /boot partition. I figured out what variables needed to be set and what lines of code changed and contacted Todd who promptly added the additional configuration to RMSPI. Now his image should work with any KISS capable TNC.
So why is this such a good system? Well it’s because Pat is a cross platform Winlink client and runs on Linux, MacOS and Windows. It provides both a web based GUI and command-line interface. This is important as if you set up a standard RMS Express station you have to be running (only) Windows and you have to be at the console in order to send/receive messages. With this setup you to connect with any web enabled device. The Pi provides an Ethernet port and wireless network for connection to any network. It also allows for multiple people to be connected at the same time. If you have multiple people doing multiple tasks they can all share the same Winlink mailbox. For instance if we deployed to a shelter we could assign the call KX1BK to our node and one person could be checking on an inventory situation while another could be doing a resident count. Both can email their findings from their phones/tablet/etc. from their current locations rather than writing down the information and having to return to the main console and having to type it up. However it’s also possible to run multiple versions of Pat, each with it’s own call sign and interface. They would all share the same RMS gateway. Since all the software used is open source it’s possible to add other functionality that you may find you need.
The hardware consists of a Pi 3, TNC-Pi, Yaesu 50W 2m mobile, small SWR meter, 7″ HDMI display with touch screen, Bluetooth keyboard/mouse, 5-30v to 5v buck converter with 2 3A USB ports. There were a number of nice buck converters out there with voltage displays, etc. The one I chose was simple but it had the all important 3A USB ports for running the Pi. The KPC3+ or 1270B requires a serial port adapter, rs-232 cable and 12v power which is a lot of extra cabling. The TNC-Pi rides on top of the Pi and requires no cables except the one to the radio. I have one coming in and hope to have it installed soon. But for now the prototype looks like this:
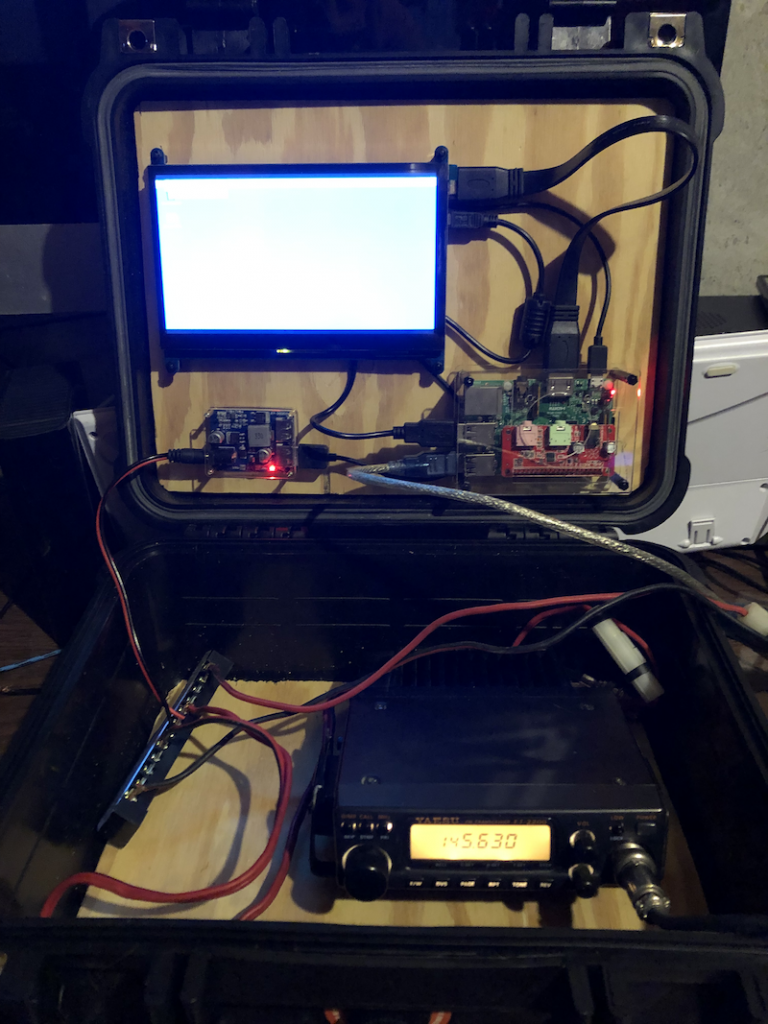
Once the TNC-Pi arrives all the stuff outside the box will no longer be needed and I’ll tidy up the rest of the wiring.
Where to go next? Since the opportunity to deploy this setup hopefully will be limited to tests/sets I decided to add additional functionality so it can be used in non emergency times rather than just sitting on the shelf. When not running as a RMS gateway this set up can act as a APRS station and/or gateway by just running Xastir and changing the frequency on the radio. I have also added a SDR dongle so that another frequency can be monitored at the same time. In the case of a shelter we could tune into the local PD/FD, NOAA weather, ham repeaters or even a FM radio station. During non emergency times it can also do those things or even act as ACARS decoder and plot the aircraft on the Xastir map. I think this additional functionality will come in handy.
I’m debating on what/where to go next. There is actually room in the box to add a 12V battery or maybe a switching power supply. Both have advantages. With the power supply if we have 120V power available all we would do is plug into an AC socket. With the internal battery the unit could operate anywhere. The amount of time the battery would last would be dependent on the power output setting of the radio and how much mail is sent in/out. I’m leaning towards the AC power supply but also including a cable to connect to a 12V DC external battery. This way the unit could be left in a car or set up in an elevated location running on a deep cycle marine battery. I also want to mount a speaker in the box for the SDR. More to come soon….
https://github.com/toddejohnson/rmspi
Update: The TNC-Pi has been installed and Yaesu radio exchanged for an Icom IC-2100H. Also added a Bluetooth/powered speaker. RTL-SDR is running well and have configured it to run Direwolf to pass APRS traffic to Xastir or to run GQRX where I have bookmarked local FD/PD, repeaters and FM radio stations. Still researching an internal power supply when running off 120V. We are also up and running as an official Gateway!

2nd Update: To make this setup more useful when sitting at home I’ve added a bunch of other functions. The unit will always run with the radio as a Winlink gateway. As mentioned before, through the first RTL-SDR receiver it will also act as a scanner. But when at home it runs as an APRS gateway using Xastir. But that’s not all, I also have it monitoring planes with dump1090 and I’m feeding the ADS-B results into Xastir so it plots the planes on the APRS map as well. The APRS functionality could be useful in a search and rescue function but it’s also fun to have running at the house. I also added Chirp just in case radios need to be reprogrammed while in the field.
Final update: had a couple of issues with the switching power supply. Picked one up on eBay and found that it maxed out at about 12.5V and when under even minimal load voltages sagged considerably. Purchased one off Amazon for the same price that worked great! Able to adjust voltage up over 15V (I set it for 13.8V) and even under full load it only drops .6V. The only thing I may eventually add is some kind of pigtail or external port that can be attached to allow easy connection to an external 12V power source like a battery. Probably do it with Powerpole connectors via something like Quicksilver Radio sells. A small lead in the box and a bag with pig tails for connecting to different situations.